摘要:三维激光扫描技术是测绘领域一项具有数据精度高、采集速度快、非接触测量等优点的新兴技术。本文对三维激光扫描技术的产生进行了介绍,该项技术的产生对于减轻测量工程的难度、提高了外业工作的效率及拓宽应用领域起到了至关重要的作用。在测绘工作中三维激光扫描仪展现了其独特的优势,是获取空间三维坐标的有效方式,引领着测绘技术新的发展方向。
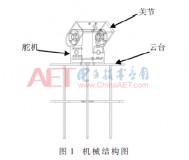
关键词: 三维激光扫描 数据采集 测绘技术 点云处理图1测区图 误差分析
1、概述
1.1 研究意义
三维激光扫描技术应用到道路工程测量,有效地解决了道路工程测量工作中存在的测量效率低、工作量大、测量危险性大等问题[1]。将该技术应用到道路工程测量工作中,可以有效地克服以往道路工程测绘技术所存在的缺点,该仪器在道路工程测量中的应用和发展,也是道路工程测量中的一次创新[2]。
1.2 研究的主要内容
①利用天宝realworks、geomagicstudio、AutoCAD及南方CASS软件进行数据处理,进行点云数据的配准与坐标转换,提取道路上一些点的坐标信息,对点云数据进行除噪处理,清除其中的车辆、行人、树木植被等非道路数据。并进行道路精度对比与评定。②点云数据经过初步处理后,在geomagicstudio软件中进一步稀释减少数据量,将稀释后的点云数据及截取的道路横断面点数据,导入CAD及CASS中进行道路特征提取,并绘制出道路平面图,横断面图及纵断面图。
2、三维激光扫描技术
2.1 三维激光扫描系统基本原理
三维激光扫描仪的工作原理与全站仪的原理具有相似的特点,同样由测角、测距、定向等组成。扫描仪主要利用的是激光测距原理,通过获取被测物体表面大量点位信息,可快速建立该物体的三维模型,并对模型各种点、线、面、体等进行处理,得到最终效果图[3]。
2.2 三维激光扫描技术的误差分析
影响三维激光扫描仪精度的因素可分为四类:仪器内部误差,被测物体引起的误差,外界环境影响以及在数据处理过程中点云拼接引起的误差。
1)仪器内部误差是指由仪器内部结构引起的误差
当扫描仪发射激光信号时经过反射会沿着相似路径传播回来,在这一过程中会因反射路径的不准确性出现误差从而影响距离的计算。另外在扫描过程中,微小的抖动及不均匀的旋转,以及人为的一些不可避免的操作会影响其扫描角度的测量,从而造成三维坐标的计算误差。
2)被测物体引起的误差
由于被测物体表面的粗糙程度不同会引起激光反射后的回波信号具有多值性,从而使得点的位置不准确。且当目标物的反射面与扫描光束间形成的交角过小时,会影响激光光斑从而影响到距离测量和位置定位,最终影响到空间三维坐标的量测。
3)外界环境影响
当温度变化较大时仪器内部系统会受到热胀冷缩的影响产生细微变化影响测角、测距;在大风情况下会使扫描镜发生微小的抖动影响定位;在空气质量差的环境中,扫描仪发射的激光信号,在空气中传播的过程中,也会产生点位坐标测量误差,从而引起测量精度。
4)点云拼接引起的误差
在除了外业数据采集中易引起测量误差,在数据处理过程中,点云拼接同样存在误差在进行目标匹配时需要提取相同目标,在手工提取时也会因为点位密集的原因而使要标定的目标中心产生误差,最终影响拼接误差[4]。
3、工程应用
3.1 测区概况
测区位于郊区的新建道路(见图1),主要包括公路、建筑物、居民区、电线杆及其他标志杆。线路东西走向,地形简单,方便测量工作。并且道路上往来的车辆及路边行人较少,不易受到过多外界因素干扰。所选区域视野较为开阔、通视良好(见图1)。
3.2 外业数据采集
外业数据的采集包括控制网的布设、平面及高程控制网的测量、标靶的建立及其三维坐标测量、三维激光扫描仪对道路实体的扫描[5]。本次选用北京天拓集团的天宝TX8型三维激光扫描仪进行数据采集。
3.3 控制点布设
本次测量工作共选用了7个控制点形成闭合环型控制网并进行坐标测量,从而测得平面标靶的空间三维坐标,最终进行精度评定(见图2)。
3.4 控制点坐标测量及标靶的设定
3.4.1 坐标测量
控制网的测量采用独立的工程坐标系,选择北方向为零方向,确定方位角。用全站仪测量控制点平面坐标,用数字水准仪测量高程。根据测得的控制点坐标,将仪器架设到控制点上,进行标靶目标的测量。输入测站坐标,以及后视点坐标,统一坐标系,测量平面标靶的三维坐标。如表1所示为标靶的三维坐标。
3.4.2 标靶作用
在进行三维激光扫描过程中,频繁的使用到了标靶球和平面标靶。标靶球是仪器所配套使用的是直径为100mm的球状目标,平面标靶是手工制作。如图3所示。平面标靶坐标的获取首先是通过全站仪进行直接测量,在布设好的控制点架设仪器,获取标靶的三维坐标[6]。在软件中完成拼接后对标靶点进行坐标赋值,即坐标系统的转换。并可以提取扫描仪下的标靶坐标,两种方法得到的数据进行对比评定其精度。
3.5 道路实体扫描
控制点布设完后,确定了控制点坐标及平面标靶的坐标后,按照自由设站的方式用三维激光扫描仪对道路实体进行全方位扫描。按照扫描规则和操作规程获取所测区域的完整数据,结束全部的外业扫描工作。
4、数据处理及精度分析
数据处理中,主要利用的是天宝RealWorks、geomagicstudio、CAD及CASS软件。
4.1 点云拼接
利用天宝RealWorks软件进行点云数据的拼接。其拼接方式分为两种,基于目标的配准和基于点云的配准[7]。因道路扫描数据量过大,从中选择测站中1~10站进行拼接,其结果如图4所示。图4中显示了扫描道路上1~10站的点云数据,颜色较为明显处为三维激光扫描仪的设站位置。在扫描中由于测程广、范围大,所以也扫描到了一些非道路目标,如建筑物、树木、车辆等,在后续处理中将进行删除。且点云数据配准误差为3.39mm。如图5为其配准报告,误差很小。
4.2 坐标赋值
在完成拼接工作后进行地理坐标系统转换,realworks软件中,在坐标输入过程应注意将X、Y坐标进行调换。对扫描到的非道路点云数据进行删除。利用分割功能对需删除的数据进行分割删除,仅保留道路数据,处理后的结果如图6所示。
4.3 点处理阶段
4.3.1 着色处理
在geomagicstudio进行着色处理,使其呈现不同的反射率信息,表现出的颜色有绿色、灰色、黑色以便于后期的处理,其结果如图7所示。
4.3.2 减少噪音
在着色处理完成后,进行减少噪音处理,目的是得到分布更加均匀、更加平滑的点云数据,其结果如图8所示。
4.3.3 采样处理
由于采集的数据量过大,后期处理麻烦,所以进行采样处理可以均匀的减少其数据量,使数据处理过程更加方便、快捷。采样方式共有四种,栅格采样、曲率采样、随机采样、统一采样。选择统一采样进行点数据处理,使其数据量减少了百分之二十,使后续处理中更易进行。结果如图9所示。图2控制网布设图;表1三维坐标数据;图3标靶图;图4拼接成果图;图5配准误差图;图6预处理成果图;图7着色处理;图8减噪
4.4 多边形处理阶段
点处理阶段的最后一步是封装处理,进入多边形阶段。选择道路扫描站中的14~22站进行点处理,封装后进行多边形阶段的处理,结果如图10所示。
4.5 道路特征提取
在利用CAD绘图前需将其转换为正确的格式,geomagicstudio软件中数据格式为asc,数据量过大。前文中已经将数据进行点处理阶段,进行封装后到多边形处理阶段,使用裁剪工具对模型进行裁剪。截取厚度为0.1mm的纵横断面图,并对数据进一步稀释,将稀释后的点云数据及薄片保存为DXF格式导入到CAD中,进行道路平面、横断面及纵断面图的绘制[8](见图11~图15)。
图9采样处理图;图10封装;图11道路平面图;图12半幅道路横断面图;图13等高线图;图14纵断面图;图15横断面图;表2坐标值对比;表3数据误差分析
4.6 测量精度分析
前文中测量了平面标靶1-8的中心点坐标,利用前部分测得的三维数据进行地理坐标的转换。用后部分的全站仪测量的三维坐标与扫描仪下对应的标靶的三维坐标进行对比分析,其数据结果如表2所示,其中(X1,Y1,Z1)为全站仪测得的点坐标,(X2,Y2,Z2)为扫描仪下测得的点坐标。根据计算出来的X和Y的坐标差值即ΔX和ΔY及点位中误差计算公式,算出每个点的平面点位中误差,如表3所示。最终的平面中误差为Ms=2.14mm。而根据全站仪测得的点位高程与扫描仪的各点高程计算两者间的差值ΔH并利用高程中误差的计算公式得到高程中误差为Mh=1.41mm。
5、结语
三维激光扫描技术作为空间三维数据的获取方式之一,为空间数据采集提供了新的方法和手段,使得空间三维数据的获取朝着数字化、自动化和智能化的方向发展。将该项技术应用于测绘领域,不仅能快速获取三维数据还能提高工作效率、减少劳动强度,同时也对测绘科学领域产生了深远的意义。三维激光扫描仪在道路上的使用,具有较好的实用价值,通过扫描获取的数据可进行高精度的等高线绘制,建立数字化道路模型。同时也为道路、公路等线状工程的特征检验提供了新的方法,为后期道路上的质量评估及后期维修提供依据。
,