三维激光扫描技术是近年出现的高新技术,又被称为“实景复制技术”[1],能够快速地提供扫描物体表面的三维点云数据,测量精度最大可精确到毫米级,多用于获取高精度高、分辨率的数字地形模型,广泛被用于变形监测、文物保护等领域。三维激光扫描仪相比较传统的测量手段,测量速度、精度等都极大提高。每秒最大测量频率为50 万点( HS1200扫描仪) ,获取大量包含细节的测量点构成的点云,通过特定的数据格式存储,然后通过相应的软件后期处理,恢复实体景物的表面模型。因此,相比传统测量手段,三维激光扫描仪的研究具有重要的现实意义。
1、三维激光扫描仪的原理及误差
1. 1 三维激光扫描仪的原理
三维激光扫描原理[2]是基于长距离的镭射扫描,通过激光发射器发射一束集束激光,系统记录它从接触到一个表面到返回的时间,扫描仪通过两个镜子计算光束的水平、垂直角度,得到精确的X、Y、Z轴距,该点就被3D 可视化软件记录下来。三维激光扫描仪获取点的效率极高,每秒几万甚至几十万个点的测量效率,能够一次性高精度、高像素地收集上百万个点。
三维激光扫描仪扫描获取的点带有坐标、色彩及物体反射率等信息,坐标系统为测量仪器坐标系,其主要有测距、测角和辅助系统组成。其坐标系定义为: 坐标原点O 为激光发射器的发射处,Z轴沿扫描面竖直向上,Y 轴为水平面内激光发射方向,X 轴为垂直于YOZ 平面向右,构成右手坐标系统。测量原理如图1 所示,则p 点的三维空间坐标,如图1 所示。


1. 2 三维激光扫描仪测量误差
式( 1) 中,S、θ、Φ 为变量,对上式进行全微分可得

根据误差传播定律可得

由式( 3) 可以看出,x、y、z 受变量S、θ、Φ 的影响,产生的误差为扫描仪系统误差[3-7]。其中S 主要产生的影响为激光光斑大小; θ、Φ 产生的误差影响为点云间隔的影响,导致扫描仪点云分辨率变化。
2、扫描仪参数
HS1200 高精度三维激光扫描仪是中海达完全自主研发的脉冲式、全波形、高精度、高频率三维激光扫描仪,具备测量精度高、点云数据处理效率高、成果应用多样化等特点,如图2 所示。仪器基本参数如下:
测程: 1200 m 最小测程: 2. 5 m
测距精度: 5 mm@100 m
数据获取速度: 最高50 万点/s
角度分辨率: 0. 001°
双轴补偿器范围: ± 5°
视场角: 垂直方向100°( - 40° - 60°)
扫描速度: 水平最快36° /s
水平方向360° 垂直3 ~ 150 线/s
尺寸: Φ188 mm × 318 mm
重量: 小于11 kg
3、三维激光扫描仪分辨率
分辨率[8-10]是影像清晰度或浓度的度量标准,表示影像平面精细程度的概念,通常表示是以横向和纵向点的数量来衡量,即水平点数× 垂直点数。在一个固定的平面内,分辨率越高意味着点数越多,图像越精细,因此在实际的测量任务中,根据需要选择相应的分辨率。分辨率设置与测量目标距离的远近、测量目的等有关。不同的测量任务,仪器参数的设置也有一定的差异。在测量时分辨率设置是主要设置的参数,分辨率越高扫描越精细,花费时间就越长。
点云分辨率可以反应扫描物细节能力,包括平面分辨率、强度分辨率、距离分辨率。点云分辨率的大小由扫描间隔和光斑大小决定,扫描间隔和光斑大小都与测量距离有关系,在扫描分辨率设置一定时,距离越远,光斑越大,扫描间隔也越大。
基本原理如下: 平面分辨率表示被测量物体表面能够被识别的最小特征尺寸,由横向和竖向分辨率组成。横向分辨率是激光信号到目标物在水平面内沿Y 轴方向的距离L,在水平面上扫过一个角度α,在X 轴方向上的产生的微小增量ΔX; 竖向分辨率表示在竖直平面内扫描仪扫描一个β 角,在Z 轴方向上产生的增量ΔZ。激光与水平面之间的夹角为α,投影与Y 轴之间的夹角为β,水平和竖直方向的分辨率计算如下:
水平方向:
ΔX = L·tanα ( 4)
对公式( 4) 两边对α 进行微分:
dΔX = L·sec2αdα ( 5)
竖直方向:
ΔZ = L·secα·tanβ ( 6)
同理,两边对β 微分:
dΔZ = L·secα·sec2βdβ ( 7)
因此,在单位面积内的点云数量

式中,dα、dβ 为已知数据,即扫描仪的最小角度分辨率,此试验中HS1200 扫描仪最小角度分辨率为0. 001°,所以在确定距离L 和角度α、β 时,即可计算该方向的扫描点数,如图3 所示。

4、扫描仪距离研究
HS1200 三维激光扫描仪扫描角度为360° ×100°( - 40° ~ 60°) ,利用三维激光扫描时,需要根据扫精度及目的选择扫描距离[11-13],扫描距离的远近同样也决定扫描的点云间隔,因此为保证扫描的点云密度满足后期数据处理的要求,需确定合适的距离得到最佳的点云数据。扫描距离的远近与仪器架设高度、建筑物的高度、三维激光扫描仪的角度分辨率以及扫描仪的视场角有关,不同类型的三维激光扫描仪由于具体参数不同,所以在对同一建筑物扫描时距离会有所不同。
建筑物高度、最小尺寸特征决定扫描仪扫描最近距离及最远距离。根据三维激光扫仪在扫描时的几何关系,可以得到如下关系式,几何关系如图4 所示。

( 1) 最近距离
HS1200 三维激光扫描仪的竖直面内的视场角为( - 40° ~ 60°) ,所以α < 60°,β > - 40°,扫描的最近距离为:
根据图4 几何关系,当H1 确定时,

当H2、h 确定时,

扫描的最近距离为L1、L2 中较大值。
( 2) 最远距离
在测量时,若被测物体较低,当三维激光扫描仪距离物体较远时,点云密度较小,难以完全反应物体表面的细节,因此根据后期数据处理时的要求,选择合适的距离,正好可以反应物体表面的细节特性,这时的距离即扫描时的最远距离。根据式8,当点云密度知道时,扫描仪距离物体的距离L 可以得到。

根据被测物体表面最小的特征尺寸,可以确定点云的合适密度n。点云合适密度计算公式为:

式中,n 为被识别的信任程度或称为点云密度的质量; m 为点云间隔; λ 为被测物体表面最小的特征尺寸。
5、扫描仪测距精度分析
本次试验是以桥梁作为对象进行扫描,根据需要布置7 个监测点,监测点布置如图5 所示,对三维激光扫描仪的测距精度进行研究,仪全站仪作为辅助测量,对比分析两种测量手段,研究扫描仪与监测点之间的距离与点位中误差之间的关系。扫描结束对扫描的点云数据进行处理[14-15],提取监测点坐标。
根据扫描经验,HS1200 扫描仪在距离为20 m范围内时,靶标能清楚识别,所以在距离桥梁20 m的位置处架设扫描仪对档位进行研究。图5 监测点布置如下:

三维激光扫描仪的广泛应用,对其精度要求也越来越高,检校仪器精度就尤为重要。HS1200 三维激光扫描仪标称精度5@ 100,设置扫描仪的基本参数,对测距精度简要分析。
根据图5 所示监测点与扫描仪之间的几何关系,计算扫描仪到各点距离,分别为36 m、27 m、20 m、17m、20 m、27 m、38 m。
扫描仪分辨率设置基本参数:
垂直分辨率为0. 019 2°,水平分辨率0. 019 2°,时间13 min。
扫描三次,每次13 min。全站仪对监测点坐标值进行测量,同时三维激光扫描仪进行扫描,后期经过与处理软件处理,提取坐标如表1 所示。
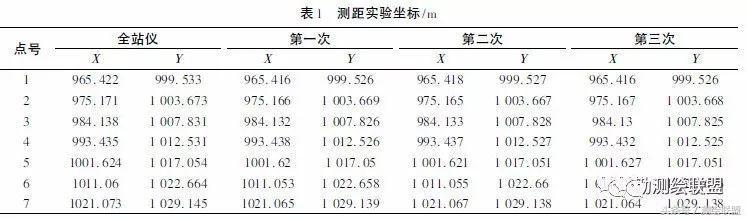
根据中误差计算公式( 贝塞尔公式) :

式中,v 表示残差,n 为观测距离次数。
根据式13 计算每个监测点点位中误差,结果如表2 所示。

由于3 与5 号、2 与6 号点距离相同,剔除中误差较大的点,得到扫描距离与点位中误差之间的关系图6 所示。
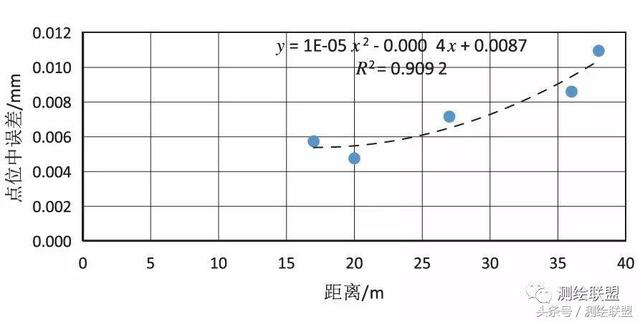
从表2 可以看出:
( 1) 在40 m 范围内,点位中误差低于12 mm,在20 m 范围内,点位中误差低于6 mm。与三维激光扫描仪标称精度相比,本次实验测量的中误差在40 m度。
( 2) 扫描仪距离与中误差之间存在
y = 0. 000 01x2 - 0. 000 4x 0. 008 7 函数关系。随着扫描距离增加中误差增大,测距精度降低。
6、结论
本次通过HS1200 扫描仪试验研究表明,扫描仪测量距离与点位精度之间存在二次多项式关系,扫描精度随着扫描距离的增大,测量精度降低。对于扫描仪测距精度的分析对以后的研究提供一定的借鉴。本次试验仍存在一定的缺陷: 扫描仪距离研究应该进行规律性的布设监测点进行研究,由于某些原因,距离设置方面存在一定的缺陷,且实验次数太少,存在偶然误差的影响。
,











