#知识创作人第七季#停车场出入口系统施工规范,彻底了解停车场施工

停车场出入口系统组成主要有:抓拍机、道闸、道闸雷达、出入口控制终端、线圈、车检器等设备组成,负责对出入场车辆进行常规管控与收费。
本期我们来了解下停车场施工规范及注意事项吧。
开始学习之前依旧送上好听音乐一首
首先,施工方案设计规划拓扑图
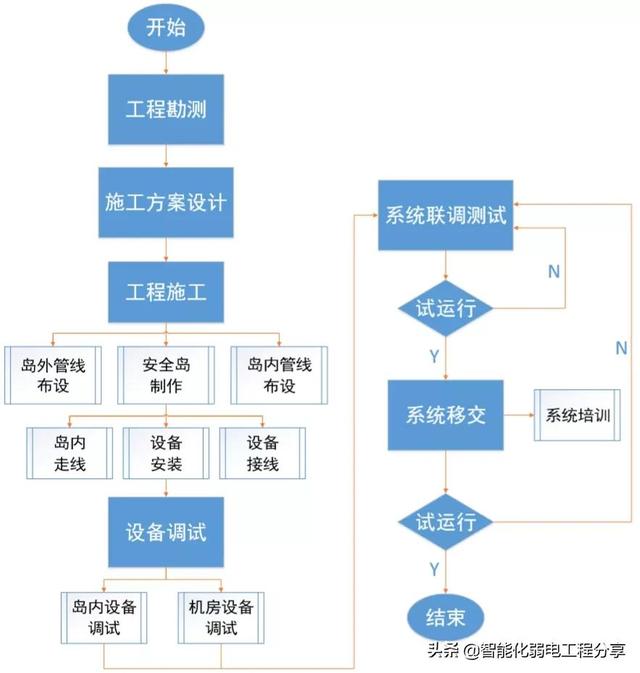
注意:
请务必重视“工程勘测”环节,针对特殊场景或复杂环境,请在勘测后及时与技术部门及时沟通。
“施工方案设计”环节,包含设计施工图纸,可事先联系施工方获取基线方案图纸,参考完成施工图纸设计,任何项目施工现场必须有对应的施工图纸作为施工指导依据。



其次,设备的组成
先了解一下它的组成,与现在主流的停车场没有多大区别,主要组成由道闸、车牌识别一体机、信息屏、车量检测器、地感线圈、PC、交换机、软件等组成停车场管理系统,具体如下图

施工完成后的效果图




然后是,停车场工程施工规范
一、安全岛制作规范
根据施工图纸的安全岛尺寸或设备基础尺寸制作安全岛。安全岛浇筑混凝土前必须按施工图纸及设备走线要求固定好预埋管,埋管深度不小于0.1m,管道走弯处不得有折断或变形,管道内不得有异物。预埋线管每隔10m远,需做0.6m*0.6m的手井。
强、弱电线缆必须分开穿管:当电源线穿管采用PVC管(或PE管)时,与信号线的管间距不小于0.15m,若采用镀锌钢管(JDG管或KBG管),与信号线的管间距可缩小至0.1m。
预埋管出口处应根据设备安装位置严格定位,并根据设备安装基础区大小排列整齐、紧凑,浇筑混凝土前应将管道两端做封堵处理。
设备周边做安全防护栏,如下图

二、地感线圈施工规范
线圈切槽需在坚实、牢固的路基上,避开破损路面;混凝土路面避开拼缝;线圈上面铺砖的施工方案要提前确认砖的厚度。
线圈周围0.5m范围内不能有大量金属,如窨井盖、伸缩门导轨、排水沟等;周围1m范围内不能有超过220V的供电电路。
当地感线圈敷设位置的下方存在钢筋网,会对线圈检测产生干扰,可增加红外对射检测方式并增加线圈匝数提升检测可靠性,或者采用雷达检测方案,必要时请联系我司技术支持确认实施方案。
接入不同车检器的两个地感线圈之间的距离不小于1.3m,接入同一个车检器的两个地感线圈之间的距离不小于0.5m。
出入混行车道,防砸线圈应置于道闸杆子下方正中位置;出入分离车道,防砸线圈应以3:7的比例横跨在道闸杆子下方(离车方向为7)。
最后,就是设备安装规范
一、自动挡车器、出入口控制机
出入口控制机和自动挡车器安装处,必须加砌水泥基础(或安全岛),且不应安装在低洼地带,以防积水对设备造成不良影响。
根据施工图纸和产品安装指南,确定机箱安装位置,标记孔位,使用钻头开孔,并用螺栓固定。机箱的固定应牢靠,不得出现松动或摇摆现象。
出入口控制机、自动挡车器的机身应垂直于水平面,其最大倾斜角度不大于1°。
设备之间应预留安全距离,确保机箱门可正常打开;自动挡车器杆子起落无遮挡。
二、出入口抓拍机
根据施工图纸,确定抓拍机安装的位置,在安全岛上标记好抓拍机立柱底座的安装孔位,通过膨胀螺丝固定立杆,安装抓拍机。
抓拍机位置到触发线圈的水平距离4m(即触发距离,根据情况3.5-5m可调)。
抓拍机安装的角度应保证车头到触发位置时,抓拍的车牌可以摆正。
T字型行车轨迹或车道较宽情况,应布置双抓拍机多角度抓拍,如下图所示。
安装设备时,抓拍机的有效视场不得被遮挡。
三、道闸雷达
道闸雷达由“触发雷达”和“防砸雷达”两部分组成。触发雷达用于监控车辆到来,触发抓拍机抓拍车牌,控制自动闸杆升起;防砸雷达用于监控车辆离开,控制自动闸杆升降,防止“砸车”、“砸人”事故发生;

注意:
①雷达不适用于大角度入场或出场的场景,车身与车道夹角不大于30°。
②触发雷达不能用于出入混行的车道场景。
③防砸雷达不能用于广告道闸或者栅栏杆道闸的场景。
④对开情况下,雷达进行错频操作。
雷达安装高度:下边沿距离路面0.6m。
防砸雷达在自动挡车器杆子起落方向的机箱侧面,正对车道,壁挂式安装。
触发雷达在与抓拍机水平距离4m(即触发距离,根据情况3.5-5m可调)处安装,可壁挂式固定在出入口控制机机箱上或者专用立柱安装。
防砸雷达纵向安装,触发雷达横向安装。
车道外侧若安装隔离护栏,请固定牢固,应避免使用伸缩带或路锥等容易移动、晃动的装置。

四、设备接线规范
严格按照施工图纸及我司施工手册要求接线。
所有外部设备连接的线头不能太长,以免外露引起短路。
强电与信号线不能穿在同一管内,必须分开铺设。
布线时应对线缆做好标记,以便后续安装、调试和维护。

另外,做好勘测的基础上,规范施工可以为出入口系统的正常运行带来一份重要的保障!

以上内容大致有所了解以后我们接下来说说
一、停车场车辆检测器和地感线圈的原理
1、工作原理
地感线圈车辆检测器,是一种基于电磁感应原理的车辆检测器。它通常在同一车道的道路路基下埋设环形线圈,通以一定工作电流,作为传感器。

地感线圈施工步骤:
步骤1 线槽定位
按照施工方案和图纸确定线槽位置,提前在对应位置放线定位。
- 线圈长边:根据车道宽度决定,要求距离车道边缘0.6-1m,总长不超过5m。
- 线圈宽边:普通车辆通行,线圈宽度1m;若有特殊车辆如卡车(底盘高)、挂车(中间空间不超过线圈宽度)、油罐车等,线圈宽度1.5m。
注意:通过挖掘机、推土机等工程类车辆,建议将道闸锁闸处理。

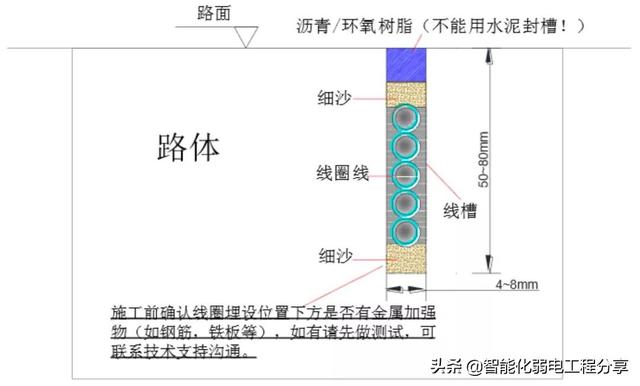
步骤2 线槽切割
- 线槽规格:线槽切割宽度4-8mm,深度50-80mm;要求开槽断面齐整,并保持各线槽深度和宽度均匀一致。
- 倒角:线槽锐角部位要倒角处理,防止损伤线圈。实际切割过程中矩形各边不能切割到底,防止切割倒角时整个三角形脱落,翘出路面。

- 引线槽:需切割至安全岛或路边手井的引线槽,因引线必须双绞,故引线槽通常比线圈环线槽宽。
线圈形状多以矩形安装为主
通常探测线圈应该是长方形。两条长边与金属物运动方向垂直,彼此间距推荐为1米。长边的长度取决于道路的宽度,通常两端比道路间距窄0.3米至1米。

步骤3 线圈线敷设
(线材规格:FVN49/0.26或不小于0.75mm²的耐高温高压导线)
- 将线槽清洁并干燥后,在底部铺一层5mm厚的细沙(防止槽底坚硬棱角割伤线材)。
- 在线圈槽中按顺时针方向绕制5—6圈线(根据现场情况操作),放入槽中的线圈线应按自然状态松弛放置,不能有应力,并且要一圈一圈压紧至槽底。
注意:
确保线材(线圈线和引线)没有伤点、绝缘层没有损坏、中间没有接头,用胶带对两个端头进行密封,防止水气进入。
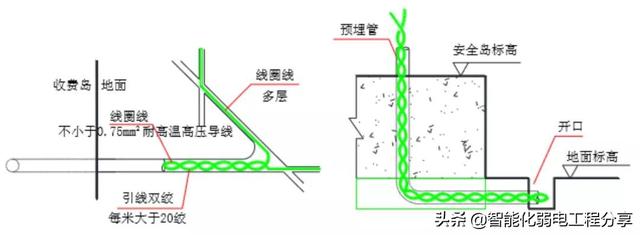
- 线圈的引线按顺时针方向双绞(每米大于20绞),放入引线槽中,在安全岛或路边手井出线时预留1.5m长的线头(接线完成后,多余的剪掉)。如下图所示。
线圈的匝数
为了使检测器工作在最佳状态,线圈的电感量应保持在100uH-300uH之间。在线圈电感不变的情况下,线圈的匝数与周长有着重要关系。周长越小,匝数就越多。一般可参照:

由于道路下可能埋设有各种电缆管线、钢筋、下水道盖等金属物质,这些都会对线圈的实际电感值产生很大影响,所以上表数据仅供用户参考。在实际施工时用户应使用电感测试仪实际测试地感线圈的电感值来确定施工的实际匝数,只要保证线圈的最终电感值在合理的工作范围之内(如在100uH-300uH之间)。
输出引线 在绕制线圈时,要留出足够长度的导线以便连接到环路感应器,又能保证中间没有接头。绕好线圈电缆以后,必须将引出电缆做成紧密双绞的形式,要求最少1 米绞合20次。否则,未双绞的输出引线将会引入干拢,使线圈电感值变得不稳定。
输出引线长度一般不应超过5米。由于探测线圈的灵敏度随引线长度的增加而降低,所以引线电缆的长度要尽可能短。

埋设方法
线圈埋设首先要用切路机在路面上切出槽来。在四个角上进行45度倒角,防止尖角破坏线圈电缆。切槽宽度一般为4mm~8mm,深度30mm~50mm。同时还要为线圈引线切出一条通到路边的槽。
但要注意:切槽内必须清洁污水或其它液体渗入。绕线圈时必须将线圈拉直,但不要绷得太紧并紧贴槽底,将线圈绕好后,将双绞好的输出引线通过引出线槽引出。
步骤4 馈线敷设(当线圈引线双绞超过10m,应布置馈线)
- 当需要多条馈线或馈线较长(超过50m)时,要尽可能在离线圈较近的地方接线。
- 线圈馈线不可使用多芯电缆,应采用2芯屏蔽双绞线,并保证每个线圈分别使用一对双绞线。
- 接头必须保证低阻率,并且对外绝缘程度要求不比原始线缆绝缘程度差。线圈馈线与引线的连接必须焊接,并用防水胶布和绝缘胶布包两层,放在防水的接线盒内。
- 馈线屏蔽线与车检器相连的一端,屏蔽层必须做接地处理。
步骤5 封槽:采用速凝环氧树脂或融化的硬质沥青
- 线材敷设完成后,需进行感知和电压检测。用万用表检测感值是否在100μH—300μH之间,检测电压值是否小于2mv(采用万用表交流毫伏档),否则需整改。
- 线圈及引线在线槽中压实后,再铺一层5mm厚细沙,防止线圈屏蔽层被高温熔化。
- 用熔化的硬质沥青或速凝环氧树脂浇注线槽。冷却凝固后槽中的浇注面会下陷,继续浇注,反复3次,直至冷却凝固后槽的浇注面与路面齐平。
注意事项
1 线圈材料:标准1.0平方耐高温镀锡线。
2 周围1米范围内不能有大量的金属,如井盖、雨水沟盖板等。
3 周围1米范围内不能有超过220V的供电线路。
4 作多个线圈时,线圈与线圈之间的距离要大于2米,否则会互相干扰。
5 标准3米宽马路,车辆检测器线圈的尺寸为2米长1米宽,角上做45°、10厘米长的倒角。如下图:

6 线圈与马路边的距离在50厘米左右,线圈为垂直叠加绕4~8圈,总长度在40~80米(含引出线)。

7 埋设线槽切割参数:宽度4mm、深度50-80mm,深度和宽度要均匀一致,应尽量避免忽深忽浅、忽宽忽窄的情况。如下图:

8 线圈应与道闸或控制机处于同一平衡位置。
9 线圈引出的两根线应该双绞,密度为每米不少于20结,未双绞的输出引线将会引起干扰。输出引线长度推荐不超过5米。由于探测线圈的灵敏度随引线长度的增加而降低,所以引线电缆的长度要尽可能短。
10 埋设好后,应用水泥、沥青、环氧树脂等材料将槽口密封固化。对于水泥路面上述三种材料均可使用,对于沥青石子路面可使用沥青或环氧树脂,使用沥青灌封需注意线圈。
海康威视停车场出入口管理和收费部分



车辆出入口控制系统由前端系统、传输系统、中心系统组成,实现对车辆的24小时全天候监控覆盖,记录所有通行车辆,自动抓拍、记录、传输和处理,同时系统还能完成车牌与车主信息管理等功能,主要设备如下:
刷卡及电动挡车器模块主要设备
电动挡车器
手动按钮能作 “升闸”、“降闸”及“停止” 操作;
支持软件控制“升闸”、“降闸”及“停止” 操作;
停电自动解锁、停电后可用摇把手动抬杆;
具有便于维护与调试的“锁闸模式”;
配备车辆检测器,具有“车过自动落闸”“防砸车”功能;
可选配路闸及通道两对红绿灯;
具备丰富的底层控制及状态返回指令,使电脑可对电动挡车器作最完备的控制;
可根据需要增加其它特殊功能。
车辆检测器
用于防砸线圈检测。
遥控发射接收器
接收无线遥控信号,并转换信号。
遥控发射器
发送无线信号。
车牌识别模块主要设备
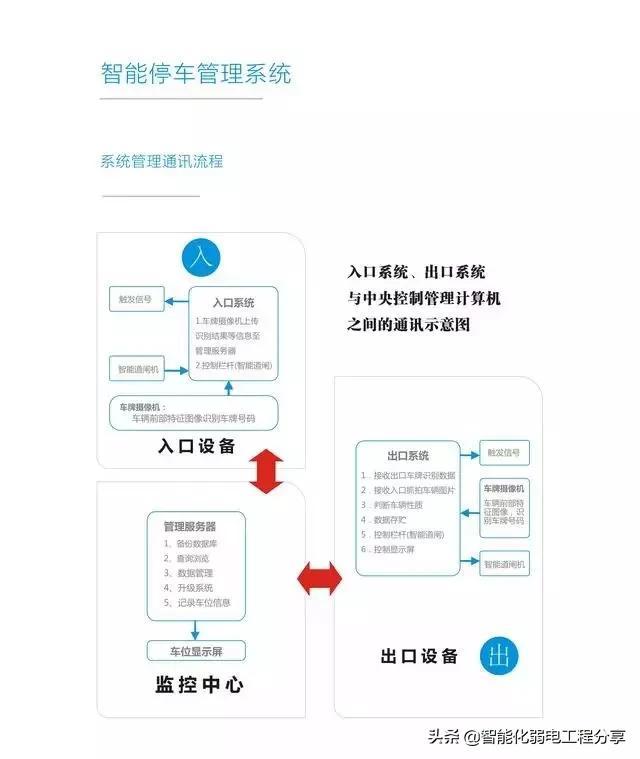
出入口视频单元
成像清晰是牌照识别的技术关键。本系统采用专用抓拍摄像机,整个图像成像控制系统是一个由抓拍摄像机、智能补光灯、成像控制软件组成的精密系统,它们之间的精确配合使得白天和晚上抓拍的车牌图像都更利于车牌识别。无论是环境照度比较低的情况下(例如夜晚),还是在强光照射下(例如晴天正午),系统均会自动调整抓拍摄像机的成像模式,使用软硬件结合的方法控制图像的曝光,保证车牌成像清晰度,非常有利于人工辨认和机器自动识别车辆牌照信息。
补光单元
智能补光灯由抓拍摄像机控制,在环境照度不足的情况下,抓拍摄像机执行精确的控制指令控制智能补光灯补光,这样保证了在全天候环境下本系统都能拍摄到包含清晰牌照图像的理想图片,在实际的使用场景中,如果要看清驾驶室人脸需要采用闪光灯,如不需要看清人脸,则采用普通的LED频闪灯。
车辆检测器
本系统采用线圈触发方式,由前端车辆检测器来检测来往通行车辆,可与防砸线圈车检器共用。
出入口控制终端
出入口控制终端负责进行前端数据(车辆信息)采集、处理、上传后端平台,可实现实时视频、抓拍图片显示、进出抓拍图片关联、实时报警信息显示、系统日志显示、软件开关闸、高峰期锁闸、设备连接状态显示、报警联动等功能。
蓝牙读卡器
对车辆上配置的蓝牙卡进行高效准确读取,确保百分百对内部车辆的快速开门,排除各种环境因素。
网络传输子系统
负责完成数据、图片、视频的传输与交换。其中前端主要由交换机、光纤收发器等组成;中心网络主要由接入层交换机以及核心交换机组成。
后端平台管理子系统
平台完成数据信息的接入、比对、记录、分析与共享。由以下软件模块组成,包括:数据库服务器、数据处理服务器、Web服务器。其中数据库服务器安装数据库软件保存系统各类数据信息;数据处理服务器安装应用处理模块负责数据的解析、存储、转发以及上下级通讯等;Web服务器安装Web Server负责向B/S用户提供访问服务。
Ø 自助缴费终端
录入车牌号码,选择出场时段后,由自助缴费终端完成收费金额的计算、收取、找零,并打印收费小票上传收费记录,实现车辆不停车出场;
Ø 中心人工缴费窗口
录入车牌号码,选择出场时段后,自动匹配车辆入场记录,在未匹配到入场的情况下由收费员“模糊查询”确认并选取入场图片,收取停车费用(刷卡、现金),车辆不停车出场;

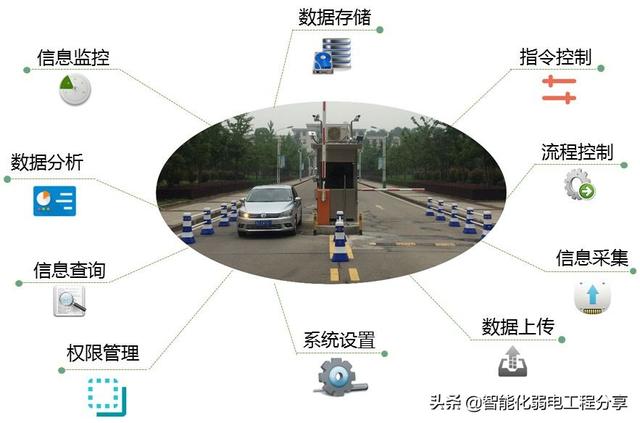
诱导、反向寻车部分
诱导部分主要有:
数据采集模块(包括车位监控相机、车位引导灯等)、中央控制模块(包括多路视频终端、中心服务器等)、数据库服务器、信息发布模块(包括室内引导屏、一体化终端查询机等)组成。
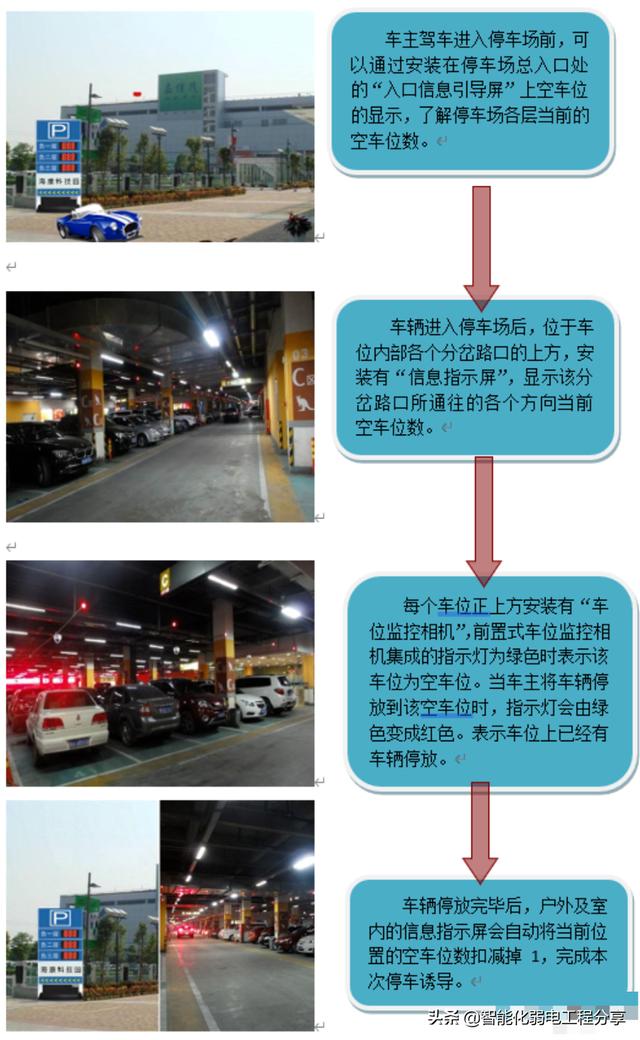
工作流程:
停车诱导:
反向寻车:

系统功能
1、车辆管控
固定车辆:车牌识别比对正确,即可进场,无需任何操作。
临时车辆:停车登记,抓拍车牌并识别记录,放行。
布控车辆:嫌疑车辆则系统自动在前端和中心产生报警,同时人工参与处理。
2、电动挡车器软件控制
客户端或中心管理平台能够远程控制电动挡车器启闭,方便操作人员管理和特殊需要。
3、图片/视频预览
过车图片和信息实时显示,视频实时预览,进出车辆自动匹配,图片预览按车道轮询。
4、1.1.4 LED屏显示
控制主机包含语音提示系统、信息显示屏,车辆驶入、驶出可以根据客户需要提示语音,显示欢迎信息等。
5、号牌自动识别功能
系统可自动对车辆牌照进行识别,包括车牌号码、车牌颜色的识别。
在实时记录通行车辆图像的同时,还具备对符合“GA36-92”(92式牌照)、“GA36-2007”(新号牌标准)、“GA36.1-2001”(02式新牌照)标准的民用车牌、警用车牌、军用车牌、武警车牌的车牌自动识别能力,包括2002式号牌。
系统能识别黑、白、蓝、黄、绿五种车牌颜色。
6、车辆信息记录
车辆信息包括车辆通信信息和车辆图像信息两类。
在车辆通过出入口时,系统能准确记录车辆通行信息,如时间、地点、方向等。
在车辆通过出入口时,牌照识别系统能准确拍摄包含车辆前端、车牌的图像,并将图像和车辆通行信息传输给出入口控制终端,并可在图像一体的信息框内叠加车辆通行信息(如时间、地点等)。
可提供车头图像(可包含车辆全貌),在双立柱方案下,闪光灯补光时拍摄的图像可全天候清晰辨别驾驶室内司乘人员面部特征。单立柱方案时抓拍摄像机与闪光灯安装在同一根杆子上。
系统采用的抓拍摄像机,具备智能成像和控制补光功能,能够在各种复杂环境(如雨雾、强逆光、弱光照、强光照等)下和夜间拍摄出清晰的图片。
7、数据管理
过车数据自动上传中心,由中心集中存储和管理,支持前端数据缓存以及断点续传。
8、数据查询
可查询通行信息、报警信息、场内车辆、操作日志、设备状态等信息。
9、报警功能
当系统识别出来的车辆车牌不符合条件时,或者车牌在黑名单库时,系统自动报警,提示工作人员进行检查,用户可根据实际需求选择不同的报警联动方式,如预览通道切换、报警输出、软件提示、LED显示等。
10、参数配置功能
设备参数配置可以实现本地配置,也可以进行远程配置。
11、权限管理
用户可配置不同的角色和权限,管理不同的出入口以及功能模块。
12、统计分析
支持车位利用率、车流量的统计分析,支持列表和图形显示。
14、设备运维
支持安装信息、设备维护信息的管理。
15、状态监测
设备运行状态监测,提示设备运行异常信息,系统自动校时。
三、系统优势
1、纯牌识车辆快速进出
车辆进入时,针对固定车辆,系统采用远距离读卡功能和具有极高的车牌识别率的高清车牌识别技术,可确保固定车辆准确识别、快速放行,识别准确率≥99%;针对临时车辆,通过车牌识别方式进入,无法识别情况下入口控制机自动吐卡,无需保安人工发卡。
车辆离开时,针对固定车辆,采用远距离读卡功能和高清车牌识别技术,确保固定车辆准确识别、快速放行;针对临时车辆,系统支持自助缴费,车主在地下车库即可完成缴费,支持现金、银行卡、支付宝等缴费手段,当已完成缴费时,系统识别车牌后出口控制机自动放行,无需保安人工收卡。
2、车主快速找车位
通过车位引导系统,在室外有区域指示屏,显示各个区域车位剩余数量,地下车库各个路口也有相应的LED指示屏,车辆只需按照指示屏的方位指示行驶,即可快速找到空余车位,实现快速停车。
3、车主快速寻车
车主需要开车离开时,通过反向寻车系统,能够精确地查询自己车辆所在的位置,并自动计算查询机和车辆之间最短路线,还可将寻车路线图发送到车主手机上,或通过手机APP实现寻车导航,从而让车主能够快速寻找到车。相比于传统的刷卡式寻车系统,本系统停车后无需专门刷卡,避免了车主因为主观因素忘记刷卡而造成的寻车功能失效的尴尬。
4、多种缴费手段
车主可选择包期缴费、中央缴费、“储值卡”缴费、临时车缴费等多种缴费方式,系统将自动匹配计算金额、不再需要刷卡计算金额。
5、 手机Web
- 支持在手机浏览器扫一扫打开寻车及缴费入口。
- 支持车辆搜索找车路线;
- 支持在手机浏览器进行停车进行支付宝缴费;
6、支持微信号和APP集成
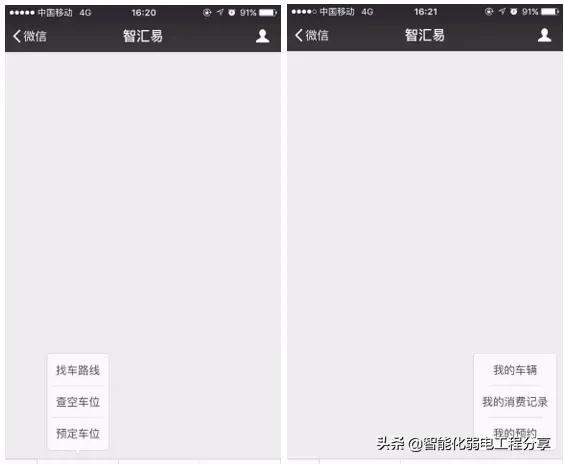
海康智能停车场管理系统已经实现和微信的打通,顾客可以通过微信的公众号来实现缴费、预定车位、寻车及绑定车牌等功能。
使用的微信公众号为例:
海康除了提供客户端和微信号的方式进行寻车,还提供了移动APP的SDK给到停车场的运营方,作为一个模块集成到其的O2O运营APP中。
APP的功能和微信端的功能也类似,初步设计了找车,付费和预定车位三个模块。
但与Web端和微信端不同的是,APP可以提供的是基于iBeacon的室内实时定位。
在有室内定位的环境下,客户在停好车后通过手机手动记录下车辆位置,待需要找车的时候再由实时位置计算出到车位的路径,这种方案在客户停车离开前如果忘记标记车位位置的情况就失效了。而在现在的视频牌识停车诱导中,用户不再需要记录车位位置而是由车位相机识别上报,但是本人的位置需要扫描现在位置的标记(通常是二维码)来生成一次性的路径,这无疑增加了顾客的操作,而对于一些比较复杂的路径上,顾客是否能够根据路径找到自己的车位也是一个难题。

找车—输入车牌号模糊查询—提示打开蓝牙—实时的室内引导。
好了今天的分享就到这里,你有认真学习到吗?记得多看几遍哦
喜欢的朋友点赞 关注 转发,我们下期再会!
,










