坐标系的种类很多,常用的坐标系有:笛卡尔直角坐标系、平面极坐标系、柱面坐标系和球面坐标系等。对于工业机器人操作,主要使用的是关节坐标系、大地坐标系、工具坐标系、用户坐标系等。

工业机器人坐标系
一、坐标系类型1、关节坐标系
机器人沿各轴轴线进行单独动作,所使用的坐标系称关节坐标系。关节坐标系在机器人调试完成后就设定完成,不可更改。

关节坐标系
2、大地坐标系
大地坐标也叫直角坐标,每种机器人对应的直角坐标方向不同,对应的直角坐标原点位置也不同。机器人相关参数设定完成后,直角坐标的零点和方向就确定了,不修改参数的情况下无法修改直角坐标。不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动;对于六轴机器人,还可执行A、B、C旋转,A轴绕X轴旋转,B轴绕Y轴旋转,C轴绕Z轴旋转,遵从右手螺旋法则。
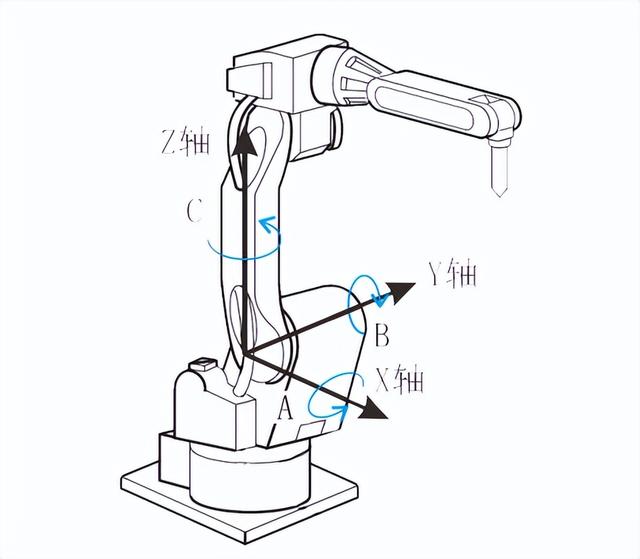
大地坐标系
3、工具坐标系
工具坐标系把机器人腕部法兰盘所持工具的有效方向作为Z 轴,并把坐标定义在工具的尖端点。0号工具坐标为基础工具坐标,不可设定、修改,该坐标与直角坐标相同。工具坐标1-49号用户可根据实际工具情况进行设定。

工具坐标系
4、用户坐标系
机器人沿着所指定的用户坐标系各轴平行移动。在关节坐标系以外的其他坐标系中,均可只改变工具姿态而不改变工具尖端点(控制点)位置,这叫做控制点不变动作。0号用户坐标系为基准用户坐标系,不可设定、修改,该坐标系和直角坐标系相同。用户坐标1-49号用户可根据需要设定。

用户坐标系
二、坐标系调用与切换1、坐标系调用
关节坐标和直角坐标的使用,直接通过状态控制键切换到对应的坐标系, 然后按坐标键 /-即使用该坐标系来控制机器人部件,或编程。工具坐标和用户坐标的使用需要调用适合的坐标号,切换到需要坐标系才可以在示教模式下,手动运动机器人或编制程序。

工具坐标系调用

用户坐标系调用
2、坐标系切换
在示教模式下,在状态控制键区域,按对应坐标键,可以循环切换:关节坐标系、直角坐标系、工具坐标系、用户坐标系。

坐标系切换
三、坐标系设定1、工具坐标系建立
为使机器人焊枪、吸盘或其它工具能准确执行直线、圆弧、圆运动,需正确地输入工具的尺寸信息,定义控制点的位置。每个机器人厂家设定的方式不同,有的是通过设置6组机器人末端不同的数据,有的是通过四点法自动算出工具控制点的位置。具体情况大家可以现场交流。
2、用户坐标系建立
根据工作面建立用户坐标系,有几个工装面就需要设置几个用户坐标系。具体情况大家可以来现场交流。
附:笛卡尔坐标系
笛卡尔坐标系是直角坐标系和斜坐标系的统称,相交于原点的两条数轴度量单位相等,则称为笛卡尔坐标系。两条数轴互相垂直则称为笛卡尔直角坐标系,否则称为笛卡尔斜角坐标系。
由于硬件条件不足、自身知识水平有限,可能有讲的不恰当之处,敬请各位多多指正!本人本着相互学习,共同进步的诚心,欢迎各位来电交流。业务涉及到智能领域内设备及产品的研发、制造、销售与技术服务,专注于智能控制领域... - 广东智易通科技有限公司
,